Here in this poster can include questions to get the answer or the inclusion of questions to test everyone and make educational content more fun and useful.Wait for your participation with us.
I will Start put the first question
Q1/Why Does an AC Motor Need a Capacitor to Start?
You will find in this PPT all important and useful information for induction motors.
I want you to summarize some benefits from the PPT at lest one.
This technical manual for Three-Phase Induction Motors is the first publication of a series on the topic of "Motor Management".
With these published fundamentals the user will have a growing reference
work on the performance and operational data required for design and
application. The following topics will be covered:
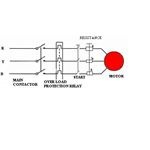
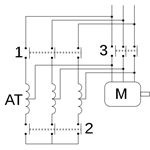
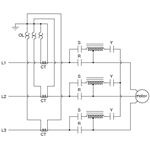
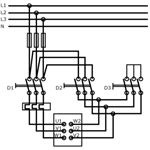
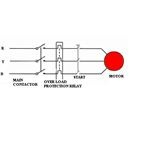
• Starting and operating motors
• Protection of motors and drives
• Selection and operation of controls
• Communications
Electric motors can be found in almost every production process today.
Getting the most out of your application is becoming more and more
important in order to ensure cost-effective operations. "Motor Management"
from Rockwell Automation will help you:
• to optimize the use of your systems
• to reduce maintenance costs
• to increase dependability
We are pleased that our publications may help you find economical and
efficient solutions for your applications.
Content:
Design
Duty Types
Selection
Dimensioning
Copyright © 1996 by Sprecher+Schuh AG Rockwell Automation, Aarau.
All information supplied is accurate to the best of our knowledge and without legal liability.
The 3-phase induction motors are of three types depending upon the type of rotor they employ namely
(i) Squirrel cage rotor
(ii) Wound rotor or slip-ring
(iii) Double squirrel cage rotor induction motors. The principle of operation is same for all types of induction motors.

 RSS Feed
RSS Feed